
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false. Read more
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Read moreBlog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Read moreBlog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Read moreBlog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Read moreprojects
Trust-Driven Human-Robot Interaction
In this project, we study how trust evolves when humans repeatedly interact with a robot recommendation system. We try to leverage quantitative models of trust to predict human behavior and design interaction strategies for the robot to promote trust in the robot’s recommendations.
We model the interaction as a trust-aware Markov Decision Process (trust-aware MDP) that consists of States, Actions, Transition Function, Reward Function, and Human Behavior Model… Read more
Trustworthy Human-AGV Interaction
In this project, we try to generate trustworthy behaviors for Automated Guided Vehicles (AGVs) while interacting with human workers in shared workspaces in manufacturing plants.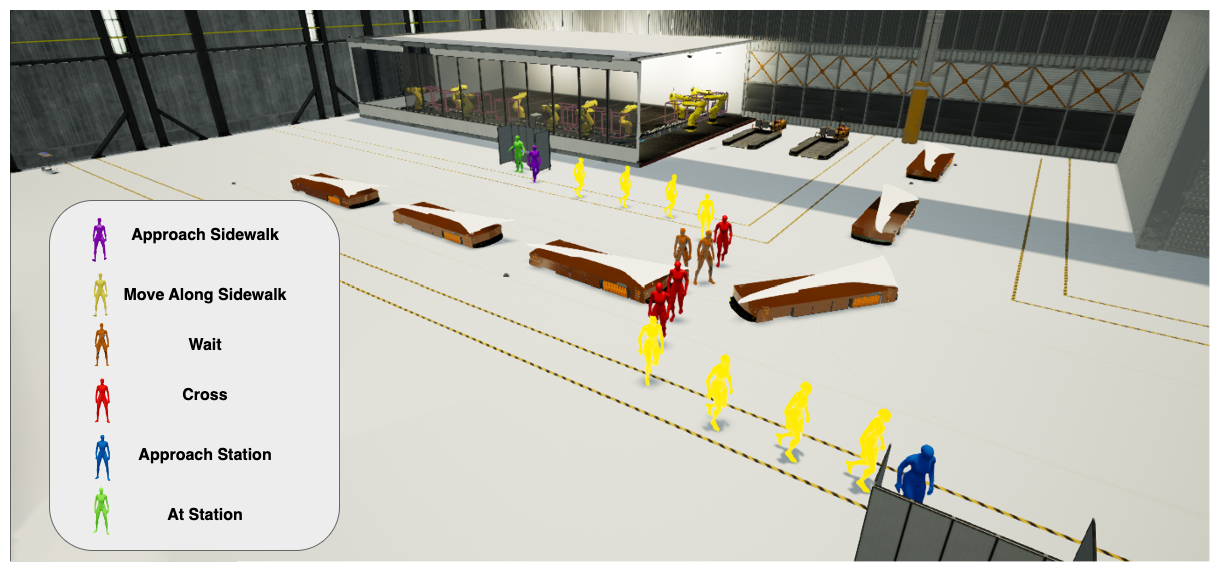
As a first step, we modeled worker motion as a Finite Automaton Model (FAM) with 6 intuitive states and transition functions that could be set up easily once we get the plan of the manufacturing plant. As a second step, we have added predictive modeling to the basic FAM model… Read more
I-ORCA: Implicitly Nudging Human Trajectories
In this project, we look at the inverse of the social navigation problem. Social Navigation deals with generating trajectories for mobile robots that minimally invade human trajectories. 
We try to see if we can leverage the obstacle avoidance nature of humans to generate trajectories for robots that minimally nudge the humans toward desired directions… Read more
Trust Dynamics with Discounting of Performance History
In an earlier project, along with some collaborators, we found three distinct types of trust dynamics exhibited by people when interacting repeatedly with robots and automation. The figure below shows the three clusters using two distinguishing features: The root mean squared error \(E_{RMS}\) between the trust reports given by the participants and the values predicted by a performance-based trust model and the average logarithm of trust reports given by the participants. 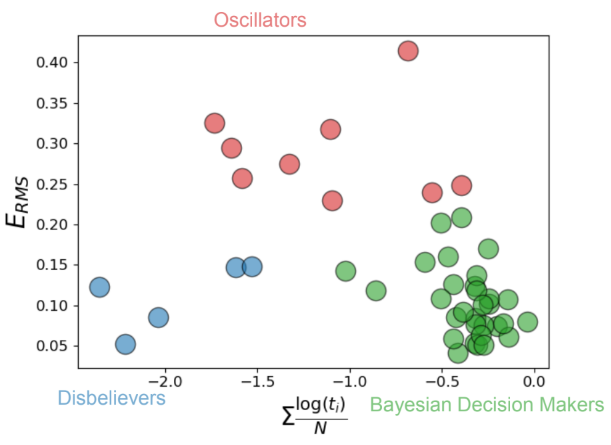
In this project, we focus on the oscillators cluster… Read more
Course Project - EECS 545 Machine Learning - Solving Wordle using Reinforcement Learning
As a part of this course project, we used deep reinforcement learning (DeepRL) to try and solve the word game Wordle. In wordle, you have 6 chances to guess a 5-letter word. After each guess, you get feedback about the correct letters and positions until you guess the correct word. 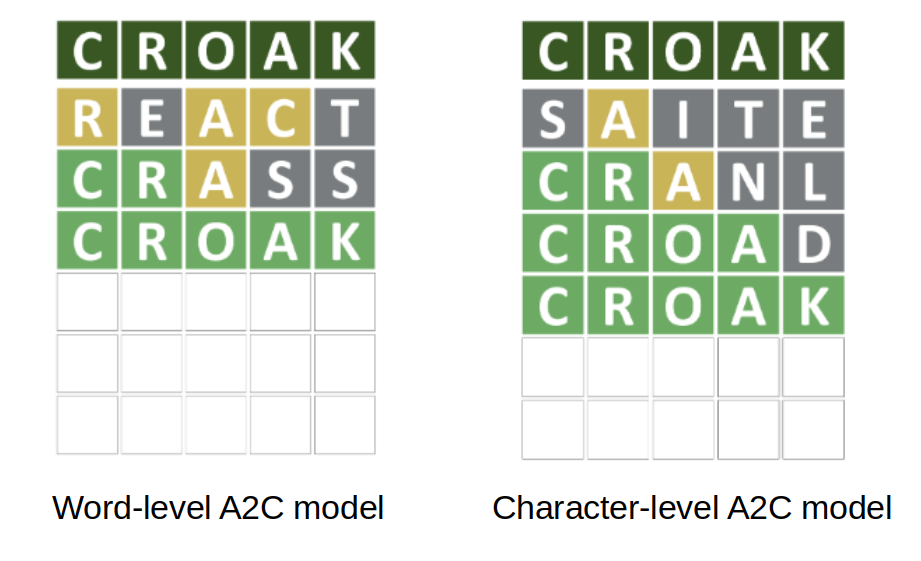
. We implemented two versions of the model, one using a dictionary of words as an input and the other guessing one character at a time, without knowing a dictionary… Read more
Course Project - IOE 691 Bayesian Data Science - Weight Uncertainty in Neural Networks
In this project, we implemented a Bayesian Neural Network (BNN) using Python and PyTorch, with the goal of replicating the results from the influential paper, Weight Uncertainty in Neural Networks. The project involved a thorough study of the paper’s methodology, followed by hands-on development of probabilistic neural network models that explicitly capture uncertainty in weight parameters. Key skills applied include deep learning, Bayesian methods, PyTorch programming, and experimental validation through empirical replication.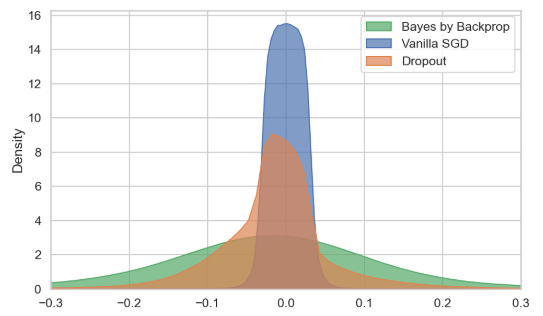
Read more
Estimating Readiness of Drivers to Takeover Control of a Vehicle in Conditionally Automated Driving
I worked as a software developer for this project, helping the lead PhD student implement sensor fusion from a variety of sensors and computing some physiological metrics in real-time using the Robot operating system (ROS) in python. The iMotions software combines various sources of data (GSR sensor, eye-tracker, and heart-rate sensor) and communicates to a computer running the following ROS framework using UDP.
The computer can then compute the metrics and send it to another server running a machine learning model to predict the driver’s readiness in real-time… Read more
Course Project - IOE 511 Nonlinear Optimization - Comparing Nonlinear Optimization Algorithms
In this project, we implemented various nonlinear optimization algorithms in MATLAB and evaluated them on a set of problems provided by the instructor.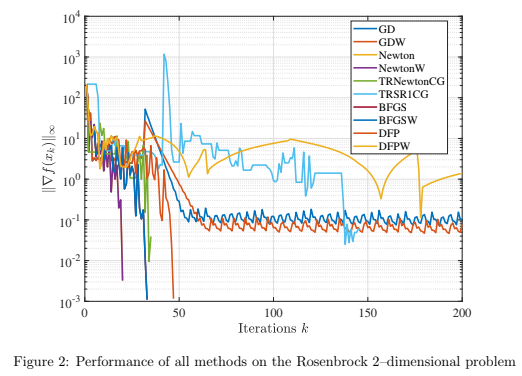
. Read more
Course Project - IOE 536 Cognitive Ergonomics - Redesigning Venmo
In this project, we analyzed the Venmo app from the perspective of cognitive ergonomics. We found a lot of inconsistent and irrational design choices leading to bad user experience. We proposed a few redesigns that will help make the user experience better. 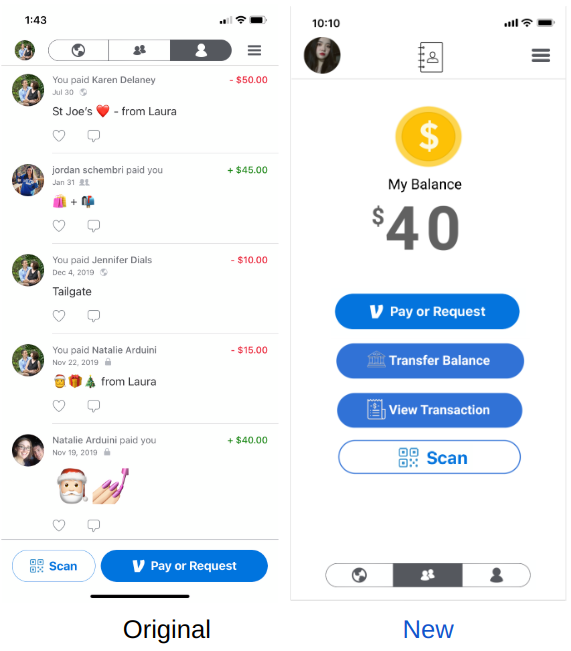
. The main thing we tried to remove was the ‘social media’ aspect of Venmo… Read more
Feedback Linearization Based Trajectory Planning for a Planar Two-Link Bipedal Walking Robot
The goal of this study is to perform a solution space analysis for the biped trajectory planning method using feedback linearization. As a first step, one such trajectory was generated during this phase of the study. The concept of feedback linearization was used to convert the highly complex and nonlinear problem into a relatively easy to solve linear differential equation. 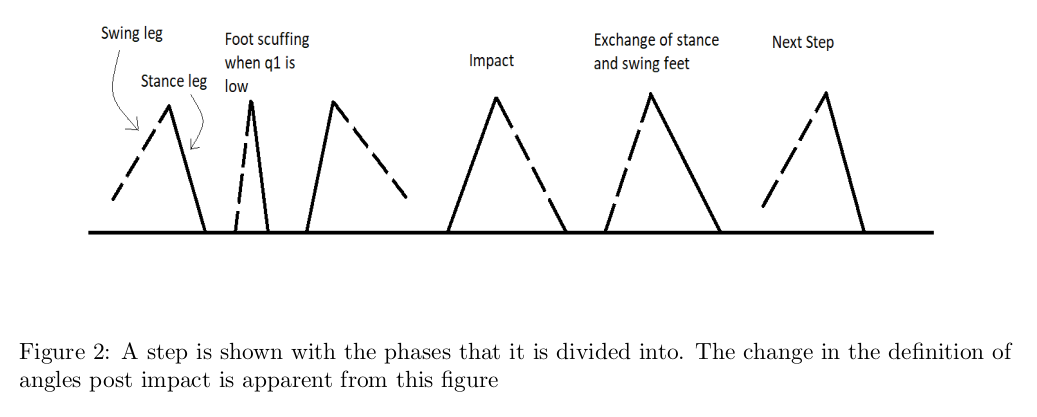
At this stage, a solution to the problem that minimizes the energy input was found and in that process, all the background code that is required for the continuation of the study was set up… Read more
publications
Clustering Trust Dynamics in a Human-Robot Sequential Decision-Making Task
Published in IEEE International Conference on Robotics and Automation (ICRA), 2022
In this paper, we present a framework for trust-aware sequential decision-making in a human-robot team. We model the problem as a finite-horizon Markov Decision Process with a reward-based performance metric, allowing the robotic agent to make trust-aware recommendations. Results of a human-subject experiment show that the proposed trust update model is able to accurately capture the human agent’s moment-to-moment trust changes. Moreover… Read more
</p>Clustering Trust Dynamics in a Human-Robot Sequential Decision-Making Task
Published in IEEE Robotics and Automation Letters, 2022
In this paper, we present a framework for trust-aware sequential decision-making in a human-robot team wherein the human agent’s trust in the robotic agent is dependent on the reward obtained by the team. We model the problem as a finite-horizon Markov Decision Process with the trust of the human on the robot as a state variable. We develop a reward-based performance metric to drive the trust update model, allowing the robotic agent to make trust-aware recommendations… Read more
Recommended citation: S. Bhat, J. B. Lyons, C. Shi and X. J. Yang, "Clustering Trust Dynamics in a Human-Robot Sequential Decision-Making Task," in IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 8815-8822, Oct. 2022, doi: 10.1109/LRA.2022.3188902.
Download Paper | Download Slides
Effect of Adapting to Human Preferences on Trust in Human-Robot Teaming
Published in AAAI Symposium Series, 2024
We present the effect of adapting to human preferences on trust in a human-robot teaming task. The team performs a task in which the robot acts as an action recommender to the human. It is assumed that the behavior of the human and the robot is based on some reward function they try to optimize. We use a new human trust-behavior model… Read more
Recommended citation: Bhat, S., Lyons, J. B., Shi, C., & Yang, X. J. (2024). Effect of Adapting to Human Preferences on Trust in Human-Robot Teaming. Proceedings of the AAAI Symposium Series, 2(1), 5-10. https://doi.org/10.1609/aaaiss.v2i1.27642
Download Paper | Download Slides
Evaluating the impact of personalized value alignment in human-robot interaction Insights into trust and team performance outcomes
Published in ACM/IEEE International Conference on Human-Robot Interaction, 2024
This paper examines the effect of real-time, personalized alignment of a robot’s reward function to the human’s values on trust and team performance. We present and compare three distinct robot interaction strategies: a non-learner strategy where the robot presumes the human’s reward function mirrors its own; a non-adaptive-learner strategy in which the robot learns the human’s reward function for trust estimation and human behavior modeling, but still optimizes… Read more
Recommended citation: Shreyas Bhat, Joseph B. Lyons, Cong Shi, and X. Jessie Yang. 2024. Evaluating the Impact of Personalized Value Alignment in Human-Robot Interaction: Insights into Trust and Team Performance Outcomes. In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24). Association for Computing Machinery, New York, NY, USA, 32–41. https://doi.org/10.1145/3610977.3634921
Download Paper | Download Slides
Value alignment and trust in human-robot interaction: Insights from simulation and user study
Published in Discovering the Frontiers of Human-Robot Interaction. Springer, Cham., 2024
With the advent of AI technologies, humans and robots are increasingly teaming up to perform collaborative tasks. To enable smooth and effective collaboration, the topic of value alignment (operationalized herein as the degree of dynamic goal alignment within a task) between the robot and the human is gaining increasing research attention. Prior literature on value alignment makes an inherent assumption that aligning the values of the robot with that of the human benefits the team. This assumption, however… Read more
Recommended citation: Bhat, S., Lyons, J.B., Shi, C., Yang, X.J. (2024). Value Alignment and Trust in Human-Robot Interaction: Insights from Simulation and User Study. In: Vinjamuri, R. (eds) Discovering the Frontiers of Human-Robot Interaction. Springer, Cham. https://doi.org/10.1007/978-3-031-66656-8_3
Download Paper
Identifying Worker Motion Through a Manufacturing Plant: A Finite Automaton Model
Published in 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), 2024
Autonomous Guided Vehicles (AGVs) are becoming increasingly common in industrial environments to transport heavy equipment around warehouses. Within the idea of Industry 5.0, these AGVs are expected to work alongside humans in the same shared workspace. To enable smooth and trustworthy interaction between workers and AGVs, the AGVs must be able to model the workers’ behavior and plan their trajectories… Read more
Recommended citation: S. Yang et al., "Identifying Worker Motion Through a Manufacturing Plant: A Finite Automaton Model," 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), Pasadena, CA, USA, 2024, pp. 1970-1977, doi: 10.1109/RO-MAN60168.2024.10731360.
Download Paper | Download Slides
Effects of Learning State Dependence of Reward Weights on Trust and Team Performance in a Human-Robot Sequential Decision-Making Task
Published in IEEE International Conference on Human-Machine Systems, 2025
this paper, we evaluate two interaction strategies for a robot in a sequential decision-making task: one which uses a state-dependent reward function and the other that uses a state-independent (constant) reward function. Towards this, we present a study done on Amazon Mechanical Turk to learn the state-dependent reward function. Using this reward function, we compare the two strategies in simulation… Read more
Recommended citation: Shreyas Bhat, Joseph B. Lyons, Cong Shi, and X. Jessie Yang. 2025. Effects of Learning State Dependence of Reward Weights on Trust and Team Performance in a Human-Robot Sequential Decision-Making Task. In Proceedings of the 2025 IEEE International Conference on Human-Machine Systems (ICHMS '25).
Download Paper | Download Slides
Interactions Between Workers and Automated Guided Vehicles: Impact of eHMI Design
Published in Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2025
As manufacturing facilities integrate Autonomated Guided Vehicles (AGVs) to improve workflow efficiency, enhancing human-AGV interaction remains critical for workplace safety. While prior research has focused on vehicle and pedestrian motion prediction, effective interaction requires two-way communication, where the AGVs clearly convey intentions to the workers to enhance safety. This study investigates the impact of external Human-Machine Interface (eHMI)… Read more
Recommended citation: Han, D. W., Bhat, S., Yang, S., Smith, J., Salour, A., Stroup, T., Pridham, P., Liu, Y., & Yang, X. J. (2025). Interactions Between Workers and Automated Guided Vehicles: Impact of eHMI Design. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 69(1), 1166-1172. https://doi.org/10.1177/10711813251372529
Download Paper
talks
Clustering Trust Dynamics in a Human-Robot Sequential Decision-Making Task
Published:
Presented the paper accepted at Robotics and Automation Letters during the IROS conference held in Kyoto, Japan Read more
Download Download Slides
</p>Clustering Trust Dynamics in a Human-Robot Sequential Decision-Making Task
Published:
Presented a poster containing initial results from a study done on Human-Robot Teaming during a workshop held during the IEEE International Conference on Robots and Automation (ICRA 2022). Read more
Download Download Slides
</p>Effect of Adapting to Human Preferences on Trust in Human-Robot Teaming
Published:
Presented some initial results from a project on human-robot teaming at the Symposium on Agent Teaming in Mixed-Motive Situations as a part of the AAAI Fall Symposim Series. The full results were later presented in the IEEE Internation Conference on Human-Robot Interaction. Read more
Download Download Slides
</p>Evaluating the impact of personalized value alignment in human-robot interaction: Insights into trust and team performance outcomes
Published:
Presented the paper accepted at ACM/IEEE HRI 2024 held in Boulder, CO. Read more
Download Download Slides
</p>Enabling Effective Human-Robot Interaction via Trust-Driven Decision-Making
Published:
Talk for the 3-minute thesis competition organized by the Engineering Student Government at the University of Michigan. We had to summarize our PhD work in 3-minutes as succinctly as possible. Read more
Download Download Slides
</p>I-ORCA – Implicitly Nudging Human Trajectories
Published:
Presented work done during the summer internship at Honda Research Institute in San Jose, CA. The work tackled a novel problem: How should we design robot trajectories that implicitly nudge human trajectories in desired directions using their collision avoidance behavior. Toward this, we inverted the well-known Optimal Reciprocal Collision Avoidance (ORCA) algorithm for modeling collision-avoiding agents. Read more
Download Download Slides
</p>Identifying Worker Motion Through a Manufacturing Plant: A Finite Automaton Model
Published:
Presented the paper accepted at IEEE ROMAN 2024 held in Pasadena, CA. Read more
Download Download Slides
</p>Trustworthy Human-AGV Interaction
Published:
Presented the work done in the previous work for the project sponsored by Boeing on “Trustworthy Human-AGV Interaction” along with Doo Won Han. We presented two aspects: modeling and predction of worker motion inside manufacturing plants (Shreyas Bhat and Shaoze Yang, presented by Shreyas Bhat) and design and evaluation of external Human-Machine Interface (eHMI) (presented by Doo Won Han) for Automated Guided Vehicles (AGVs). Read more
Download Download Slides
</p>Effects of Learning State Dependence of Reward Weights on Trust and Team Performance in a Human-Robot Sequential Decision-Making Task
Published:
Presented the paper accepted at the IEEE ICHMS 2025 held in Abu Dhabi, UAE. The paper was one of three papers nominated for the best student paper. Read more
Download Download Slides
</p>Enabling Effective Human-Robot Collaboration via Trust-Driven Decision-Making
Published:
Successfully defended my dissertation. My committee included Dr. Jessie Yang, Dr. Cong Shi, Dr. Joseph Lyons, Dr. Brian Denton, and Dr. Patricia Alves-Oliveira. Read more
Download Download Slides
</p>teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Heading 1
Heading 2
Heading 3
Read moreTeaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.